|
Software systems and computational methods
Reference:
Logunova O.S., Kukhta I.B., Reshetnikova E.S.
Algorithm development for 3D image visualization: algorithm of layerwise transformation in compression and spread of a digital cube
// Software systems and computational methods.
2020. ą 4.
P. 69-81.
DOI: 10.7256/2454-0714.2020.4.34303 URL: https://en.nbpublish.com/library_read_article.php?id=34303
Algorithm development for 3D image visualization: algorithm of layerwise transformation in compression and spread of a digital cube
Logunova Oksana Sergeevna
Doctor of Technical Science
Professor, the department of Computer Science and Programming, Nosov Magnitogorsk State Technical University
455000, Russia, Chelyabinskaya oblast', g. Magnitogorsk, ul. Lenina, 38

|
logunova66@gmail.com
|
|
 |
Kukhta Yuliya Borisovna
PhD in Technical Science
Docent, the department of Computer Science and Programming, Nosov Magnitogorsk State Technical University
455000, Russia, Chelyabinskaya oblast', g. Magnitogorsk, ul. Lenina, 38
|
|
perfectumyuka@mail.ru
|
|
 |
|
Reshetnikova Elena Sergeevna
PhD in Technical Science
Docent, the department of Engineering and Operation of Metallurgical Equipment, Nosov Magnitogorsk State Technical University
455000, Russia, Chelyabinskaya oblast', g. Magnitogorsk, pr. Lenina, 38, aud. 298
|
|
elenresh74@gmail.com
|
|
 |
Other publications by this author
|
|
|
DOI: 10.7256/2454-0714.2020.4.34303
Received:
12-11-2020
Published:
31-12-2020
Abstract:
One of the promising areas of software development is the modeling of shapes of various objects with graphical representation of the process itself. The relevance of creation of such systems is first and foremost substantiated by providing a potential user with opportunity to visualize the process of shaping the object under the influence of external factors. Such software modules are highly demanded in such fields as modeling of deformation of a steel ingot in manufacturing rolled steel, prediction of occurrence of defects caused by external influence upon objects of various shape, as well as visualization of work of technical equipment related to external impact upon the object, which changes its shape as a result of applied forces. Elaboration of such systems allows inventing emulators that are demanded in educational institutions, as they replace expensive equipment for training practical skills of the students. For example, in medical universities, such software and hardware systems can be used for acquiring practical skills of working with medical equipment, like installation of ultrasonography. The standard training process for carrying out ultrasound examination in a medical university consists of two stages: theoretical and practical. In the course of training, students are not allowed to use ultrasonography machine as many times to be able to acquire sufficient skills in working with medical equipment. Therefore, it is relevant to develop an assistant robotic system for training, which would serve as an emulator of an actual ultrasonography equipment. The first stage of implementation of such project is the development of a specialized software product that would allow visualizing the image of human organs in 3D format with an option of scaling, rotation and deformation, which occurs due to application of pressure on soft tissues using special joystick during ultrasonography examination.
Keywords:
visualization, digital cube, modeling, 3D-object, software, IT technologies, simulation model, polygon grid, 3D-modeling, algorithm
Ęëŕńńčôčęŕöč˙ đŕçđŕáîňîę â îáëŕńňč âčçóŕëčçŕöčč č ěîäĺëčđîâŕíč˙ ăđŕôč÷ĺńęčő 3D îáúĺęňîâ
Äčíŕěč÷íîĺ đŕçâčňčĺ IT-ňĺőíîëîăčé ďîëîćčňĺëüíî âëč˙ĺň íŕ ěíîćĺńňâî ńôĺđ äĺ˙ňĺëüíîńňč ÷ĺëîâĺęŕ ďóňĺě óďđîůĺíč˙ đĺřĺíč˙ ěíîăčő ňđóäîĺěęčő çŕäŕ÷. Đŕçđŕáŕňűâŕĺňń˙ îăđîěíîĺ ęîëč÷ĺńňâî ďđĺäěĺňíî-îđčĺíňčđîâŕííűő ďđîăđŕěě, ďîçâîë˙ţůčő ýôôĺęňčâíî čńďîëüçîâŕňü čő ďđĺčěóůĺńňâŕ â đŕçëč÷íűő îňđŕńë˙ő. Ę îäíčě čç ďĺđńďĺęňčâíűő íŕďđŕâëĺíčé đŕçđŕáîňęč ďđîăđŕěěíîăî îáĺńďĺ÷ĺíč˙ ěîćíî îňíĺńňč ăđŕôč÷ĺńęîĺ ěîäĺëčđîâŕíčĺ 3D îáúĺęňîâ đŕçëč÷íîé ôîđěű ń âîçěîćíîńňüţ čő ôîđěîčçěĺíĺíč˙ [1]. Âîńňđĺáîâŕííîńňü ňŕęčő đŕçđŕáîňîę îáú˙ńí˙ĺňń˙ ďîňđĺáíîńňüţ äĺňŕëüíî âčçóŕëčçčđîâŕňü ěíîćĺńňâî îáúĺęňîâ đĺŕëüíîăî ěčđŕ, ÷ňî ďîçâîë˙ĺň ńîçäŕâŕňü čěčňŕöčîííűĺ ěîäĺëč [2] č čńďîëüçîâŕňü čő â ęŕ÷ĺńňâĺ áŕçčńŕ äë˙ čçó÷ĺíč˙ č îďčńŕíč˙ ńëîćíűő ńňđóęňóđ č ďđîöĺńńîâ [3]. Ďđîĺęňčđîâŕíčĺ č đŕçđŕáîňęŕ ňŕęčő ăđŕôč÷ĺńęčő ěîäóëĺé îńíîâűâŕĺňń˙ íŕ ěŕňĺěŕňč÷ĺńęîě îďčńŕíčč č ěîäĺëčđîâŕíčč, đĺŕëčçîâŕííîě â ôîđěŕňĺ ŕëăîđčňěîâ ďđîăđŕěěíîăî îáĺńďĺ÷ĺíč˙. Îäíŕęî, ńóůĺńňâóĺň đ˙ä ńëîćíîńňĺé, ńâ˙çŕííűő, ďđĺćäĺ âńĺăî, ń íĺîáőîäčěîńňüţ ÷ĺňęî č áűńňđî îňîáđŕćŕňü čçîáđŕćĺíčĺ ń ěŕęńčěŕëüíîé äĺňŕëčçŕöčĺé. Ŕíŕëčç ňĺîđĺňč÷ĺńęčő č ďđŕęňč÷ĺńęčő đŕçđŕáîňîę ďîęŕçŕë, ÷ňî đĺřčňü ýňó ďđîáëĺěó ěîćíî đŕçëč÷íűěč ńďîńîáŕěč [4-5], íŕďđčěĺđ, čńďîëüçîâŕňü ŕëăîđčňěű, ďîçâîë˙ţůčĺ âűďîëíčňü:
- ňđĺőěĺđíîĺ ěîäĺëčđîâŕíčĺ âčçóŕëčçŕöčč 3D îáúĺęňŕ [1-5];
- ňđĺőěĺđíîĺ ěîäĺëčđîâŕíčĺ äčíŕěč÷ĺńęčő ďđĺîáđŕçîâŕíčé 3D îáúĺęňŕ [6-9];
- ňđĺőěĺđíîĺ čěčňŕöčîííîĺ ěîäĺëčđîâŕíčĺ ćčçíĺííîăî öčęëŕ 3D îáúĺęňŕ [10-12];
Ďî đĺçóëüňŕňŕě ňĺîđĺňčęî-číôîđěŕöčîííîăî ŕíŕëčçŕ đŕçđŕáîňîę â îáëŕńňč ěîäĺëčđîâŕíč˙ 3D îáúĺęňŕ ŕâňîđŕěč ďîëó÷ĺíŕ ęëŕńńčôčęŕöč˙, ďîçâîëčâřŕ˙ îőŕđŕęňĺđčçîâŕňü îńíîâíűĺ ňĺíäĺíöčč đŕçâčňč˙ ŕëăîđčňěîâ, đĺŕëčçóţůčő ďîńňđîĺíčĺ ńëîćíűő ăđŕôč÷ĺńęčő îáúĺęňîâ (đčń. 1).
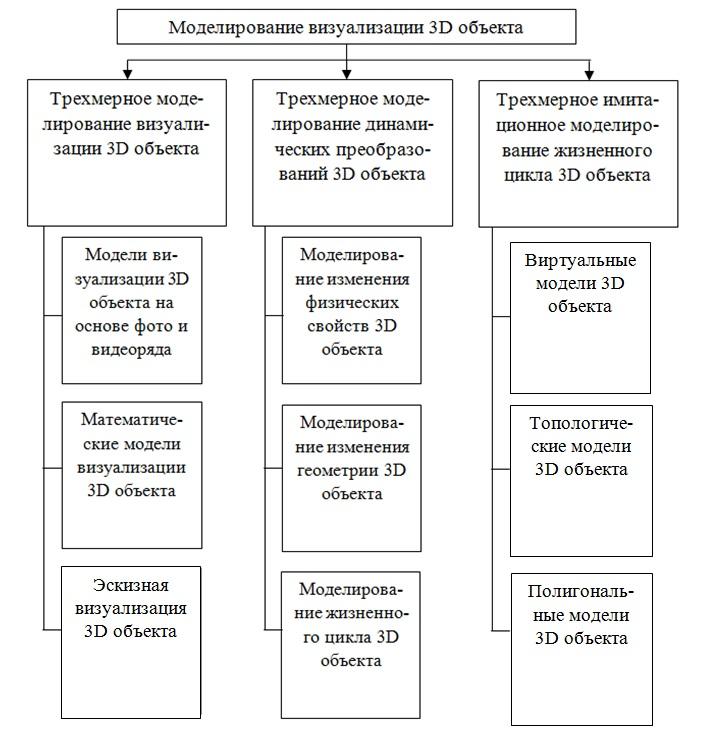
Đčń. 1. Ęëŕńńčôčęŕöč˙ đŕçđŕáîňîę â îáëŕńňč âčçóŕëčçŕöčč č ěîäĺëčđîâŕíč˙ ăđŕôč÷ĺńęčő 3D îáúĺęňîâ
Ńëĺäóĺň îňěĺňčňü, ÷ňî íŕ ňĺęóůčé ěîěĺíň ńóůĺńňâóĺň ěíîćĺńňâî đŕçíîîáđŕçíűő ďŕęĺňîâ ďđčęëŕäíűő ďđîăđŕěě č đŕçđŕáîňŕííűő ŕëăîđčňěîâ [13-15], ęîňîđűĺ ěîăóň đĺřčňü çŕäŕ÷ó ěîäĺëčđîâŕíč˙ âčçóŕëčçŕöčč 3D îáúĺęňŕ ń âîçěîćíîńňüţ äŕëüíĺéřĺăî ďđĺîáđŕçîâŕíč˙, ęŕę ôîđěű ýňîăî îáúĺęňŕ, ňŕę č ĺăî îńíîâíűő ńâîéńňâ. Ńđĺäč ńóůĺńňâóţůčő đŕçđŕáîňîę ěîćíî âűäĺëčňü ňŕęčĺ ďđîăđŕěěíűĺ ńčńňĺěű, ęŕę DEFORM, ANSYS, ABAQUS č COSMOS. Îńîáĺííîńňü ýňčő ďđčęëŕäíűő ďŕęĺňîâ – íŕëč÷čĺ âńňđîĺííűő ěîäóëĺé, ďîçâîë˙ţůčő ďđîâîäčňü ěíîăîöĺëĺâîé číćĺíĺđíűé ěĺćäčńöčďëčíŕđíűé ŕíŕëčç, ďđč÷ĺě ęŕę äë˙ íŕó÷íî-čńńëĺäîâŕňĺëüńęčő, ňŕę č ó÷ĺáíűő öĺëĺé â ńŕěűő đŕçíűő ńôĺđŕő äĺ˙ňĺëüíîńňč, â ÷čńëĺ ęîňîđűő: ŕâňîěîáčëĺńňđîĺíčĺ, ýëĺęňđîíčęŕ, ěĺňŕëëóđăč˙, íĺôňĺäîáű÷ŕ č ďĺđĺđŕáîňęŕ, ďđîčçâîäńňâî ňîâŕđîâ íŕđîäíîăî ďîňđĺáëĺíč˙, îáůŕ˙ ěĺőŕíčęŕ č ăĺîěĺőŕíčęŕ. Ę íĺńîěíĺííűě ďëţńŕě ďđĺäńňŕâëĺííűő ńčńňĺě ěîćíî îňíĺńňč âîçěîćíîńňü ńîçäŕâŕňü đŕçíîîáđŕçíűĺ ăĺîěĺňđč÷ĺńęčĺ 3D ěîäĺëč, đŕçáčâŕňü čő íŕ ęîíĺ÷íűĺ ýëĺěĺíňű, îďđĺäĺë˙ňü âńĺ ďŕđŕěĺňđű ăđŕôč÷ĺńęîăî îáúĺęňŕ, ďđîâîäčňü ňĺîđĺňč÷ĺńęčé ŕíŕëčç č ň.ä. Âńĺ âűřĺ îďčńŕííîĺ đĺŕëčçîâŕíî ďđč ďîěîůč ŕëăîđčňěîâ, ďîâűřŕţůčő óńňîé÷čâîńňü âű÷čńëčňĺëüíîăî ďđîöĺńńŕ č óëó÷řŕţůčő ńőîäčěîńňü đĺçóëüňŕňîâ. Îäíŕęî, ďđĺäńňŕâëĺííűĺ đŕçđŕáîňęč íĺ ěîăóň đĺřčňü ďđîáëĺěíî-îđčĺíňčđîâŕííűĺ çŕäŕ÷č, ńâ˙çŕííűĺ ńî ńďĺöčôč÷íîé ďđĺäěĺňíîé îáëŕńňüţ – ďîńňđîĺíčĺ îáúĺěíîăî 3D îáúĺęňŕ íŕ îńíîâĺ ŕíŕëčçŕ ôîňîđĺŕëčńňč÷ĺńęîăî čçîáđŕćĺíč˙, ďđĺäńňŕâëĺííîăî â ôîđěŕňĺ ěŕńńčâŕ ńíčěęîâ.  ńâ˙çč ń ÷ĺě, ŕęňóŕëüíűě ˙âë˙ĺňń˙ đŕçđŕáîňęŕ ŕëăîđčňěîâ, ďîçâîë˙ţůčő âűďîëíčňü äĺňŕëüíîĺ ďîńňđîĺíčĺ 3D îáúĺęňŕ â ôîđěŕňĺ öčôđîâîăî ęóáŕ ń âîçěîćíîńňüţ ĺăî ďđĺîáđŕçîâŕíč˙ č âčçóŕëčçŕöčč đĺçóëüňŕňîâ â îáúĺěíîé ôîđěĺ č ëţáîě ďëîńęîě ńĺ÷ĺíčč, ÷ňî č ˙âë˙ĺňń˙ îńíîâíîé öĺëüţ ďđîĺęňŕ. Ďđîĺęňčđîâŕíčĺ ňŕęîé ďđîăđŕěěíîé ńčńňĺěű íŕ îńíîâĺ đĺŕëčçîâŕííűő ŕëăîđčňěîâ ďîçâîëčň đĺřčňü çŕäŕ÷ó, ńâ˙çŕííóţ ń ďîńňđîĺíčĺě ňđĺíŕćĺđŕ-ýěóë˙ňîđŕ ÓÇČ-óńňŕíîâęč.
Äë˙ ĺĺ äîńňčćĺíč˙ íĺîáőîäčěî đĺřčňü ńëĺäóţůčĺ çŕäŕ÷č:
- ôîđěčđîâŕíčĺ 3D čçîáđŕćĺíč˙ â âčäĺ öčôđîâîăî ęóáŕ ń âîçěîćíîńňüţ ĺăî đŕńńëîĺíč˙ ďî äčńęđĺňíîé ńĺňęĺ;
- đŕçđŕáîňęŕ ŕëăîđčňěîâ äë˙ ňđŕíńôîđěŕöčč öčôđîâîăî ęóáŕ;
- đŕçđŕáîňęŕ ęîěďëĺęńŕ ŕëăîđčňěîâ âčçóŕëčçŕöč˙ ýôôĺęňîâ ňđŕíńôîđěŕöčč öčôđîâîăî ęóáŕ: âűáîđŕ ďîëîćĺíč˙ ńĺ÷ĺíč˙ öčôđîâîăî ęóáŕ, îďđĺäĺëĺíč˙ ďîńëîéíîé öčôđîâîé ăŕěěű îňîáđŕćĺíč˙ ńćŕňč˙ č đŕńň˙ćĺíč˙, îňîáđŕćĺíč˙ ęîěďîçčöčîííîăî ńĺ÷ĺíč˙ öčôđîâîăî ęóáŕ.
Đŕçđŕáîňŕííűĺ ŕëăîđčňěű ë˙ăóň â îńíîâó ďđîăđŕěěíîé ÷ŕńňč ňđĺíŕćĺđŕ-ýěóë˙ňîđŕ ÓÇČ-óńňŕíîâęč. Ďđîĺęňčđîâŕíčĺ ŕďďŕđŕňíîé ÷ŕńňč č ńîçäŕíčĺ ěîäóëĺé äë˙ đŕńďîçíŕâŕíč˙ ôîňîđ˙äŕ č ďîńňđîĺíč˙ đĺŕëčńňč÷íîăî čçîáđŕćĺíč˙ áóäĺň ˙âë˙ňüń˙ ńëĺäóţůčě ýňŕďîě ďđîĺęňŕ.
Ŕëăîđčňě ďîńňđîĺíč˙ öčôđîâîăî ęóáŕ äë˙ 3D čçîáđŕćĺíč˙
Ńóůĺńňâóĺň ěíîćĺńňâî ŕëăîđčňěîâ âčçóŕëčçŕöčč 3D îáúĺęňŕ, ęîňîđűĺ îńíîâűâŕţňń˙ íŕ ěŕňĺěŕňč÷ĺńęîě îďčńŕíčč ăĺîěĺňđčč čçîáđŕćĺíč˙ čëč íŕ ŕíŕëčçĺ ôîňî-đ˙äŕ, ďîëó÷ĺííîăî ďđč ďîěîůč âíĺříčő îďňč÷ĺńęčő óńňđîéńňâ:
- ŕëăîđčňěű ďîńňđî÷íîăî âűâîäŕ ăđŕôč÷ĺńęîé číôîđěŕöčč. Ńóňü çŕęëţ÷ŕĺňń˙ â îńóůĺńňâëĺíčč ôîđěŕňčđîâŕííîăî âűâîäŕ ăđŕôč÷ĺńęîé číôîđěŕöčč ňŕęčě îáđŕçîě, ÷ňî äŕííűĺ ďĺđĺäŕţňń˙ íŕ ďĺđńîíŕëüíűé ęîěďüţňĺđ ďîńňđî÷íî, ďîęŕ íĺ áóäĺň çŕâĺđřĺí âűâîä âńĺăî áëîęŕ [6];
- ŕëăîđčňěű, ďîçâîë˙ţůčĺ ŕâňîěŕňč÷ĺńęč îńóůĺńňâë˙ňü ďîńňđîĺíčĺ ňđĺőěĺđíűő öčôđîâűő ěîäĺëĺé ďî íŕçĺěíűě ôîňîńíčěęŕě [4]. Îíč îńíîâŕíű íŕ čňĺđŕňčâíîě ďđčěĺíĺíčč ěĺňîäŕ ěčíčěŕëüíîăî đŕçđĺçŕ ăđŕôŕ, ďîńňđîĺííîăî íŕ ěíîćĺńňâĺ ńíčěęîâ, ń čńďîëüçîâŕíčĺě ńóďĺđ ďčęńĺëîâ â ęŕ÷ĺńňâĺ âĺđřčí č óňî÷íĺíč˙ ńčëóýňŕ ń ďđčěĺíĺíčĺě, ňŕę íŕçűâŕĺěűő âčçóŕëüíűő ęîíóńîâ. Ďîëó÷ĺííűĺ ňŕęčě îáđŕçîě ńčëóýňű čńďîëüçóţň â ęŕ÷ĺńňâĺ îäíîăî čç îăđŕíč÷ĺíčé ďđč ďîńëĺäóţůĺě ŕâňîěŕňč÷ĺńęîě ďîńňđîĺíčč öčôđîâűő ňđĺőěĺđíűő ěîäĺëĺé îáúĺęňîâ;
- ŕëăîđčňěű, ďîńňđîĺííűĺ ń čńďîëüçîâŕíčĺě íĺéđîńĺňĺé. Äŕţň âîçěîćíîńňü âčçóŕëčçŕöčč 3D îáúĺęňŕ íŕ îńíîâĺ đŕńďîçíŕâŕíč˙ ôîňîđ˙äŕ [7]. Ýôôĺęňčâíîńňü ňŕęîăî ďîäőîäŕ çŕâčńčň îň ňĺő äŕííűő, íŕ ęîňîđűő ďđîčńőîäčň ďĺđâîíŕ÷ŕëüíîĺ îáó÷ĺíčĺ ńčńňĺěű áĺç ó÷¸ňŕ ďîěĺő đĺŕëüíűő ôîňîńíčěęîâ.
Ę äîńňîčíńňâŕě ďđĺäńňŕâëĺííűő ŕëăîđčňěîâ ěîćíî îňíĺńňč îňíîńčňĺëüíóţ ďđîńňîňó đĺŕëčçŕöčč č âîçěîćíîńňü čńďîëüçîâŕíč˙ äŕííűő áĺç äŕëüíĺéřĺé ěŕňĺěŕňč÷ĺńęîé îáđŕáîňęč; íĺäîńňŕňęč – áîëüřîĺ ÷čńëî îďĺđŕöčé, čńďîëüçóĺěűő ďđč âűâîäĺ číôîđěŕöčč č âîçěîćíîńňü ďîňĺđč ĺĺ öĺëîńňíîńňč, ÷ňî ďđčâĺäĺň ę čńęŕćĺíčţ ăđŕôč÷ĺńęîăî ďđĺäńňŕâëĺíč˙ 3D îáúĺęňŕ ďđč ĺăî âčçóŕëčçŕöčč.
Íĺńěîňđ˙ íŕ íŕëč÷čĺ đŕçíîîáđŕçč˙ ăîňîâűő đĺřĺíčé, ęŕćäűé đŕçđŕáîň÷čę ďđîăđŕěěíîé ńčńňĺěű ńňŕëęčâŕĺňń˙ ń âűáîđîě ěĺňîäŕ âčçóŕëčçŕöčč 3D îáúĺęňŕ č ńďîńîáîě ďđĺäńňŕâëĺíč˙ ĺăî âíóňđĺííčé ńňđóęňóđű č ďŕđŕěĺňđîâ. Íŕďđčěĺđ, ěîćíî čńďîëüçîâŕňü íĺéđîńĺňĺâîĺ ěîäĺëčđîâŕíčĺ, ěĺňîä ęîíĺ÷íűő ýëĺěĺíňîâ čëč ćĺ öčôđîâîé ęóá, ęŕę ńďîńîá čäĺíňčôčęŕöčč č âčçóŕëčçŕöčč îáúĺęňŕ. Ďĺđâűĺ äâŕ ńďîńîáŕ, íĺńîěíĺííî, čěĺţň đ˙ä äîńňîčíńňâ, íî íĺ âńĺăäŕ ěîăóň áűňü čńďîëüçîâŕíű â ńâ˙çč ń íĺîáőîäčěîńňüţ ďîńňđîĺíč˙ öĺëîńňíîăî ěíîăîóđîâíĺâîăî ďîäőîäŕ ę ěîäĺëčđîâŕíčţ âčçóŕëüíîăî ďđĺäńňŕâëĺíč˙ îáúĺęňŕ č çíŕ÷čňĺëüíîé âű÷čńëčňĺëüíîé ńëîćíîńňč, ňđĺáóţůĺé çŕ÷ŕńňóţ ěîůíîăî ňĺőíč÷ĺńęîăî îńíŕůĺíč˙. Ďîýňîěó äë˙ đĺřĺíč˙ çŕäŕ÷č âčçóŕëčçŕöčč 3D îáúĺęňŕ áűë âűáđŕí ôîđěŕň ďđĺäńňŕâëĺíč˙ číôîđěŕöčč î í¸ě â âčäĺ öčôđîâîăî ęóáŕ. Ńóňü ňŕęîăî ďîäőîäŕ çŕęëţ÷ŕĺňń˙ â äĺňŕëüíîé âčçóŕëčçŕöčč ňđĺőěĺđíîăî ňĺëŕ â âčäĺ ěíîăîńëîéíîé ďîëčăîíŕëüíîé ńĺňęč, óçëű ęîňîđîé ńâ˙çŕíű ěĺćäó ńîáîé (đčń. 2).
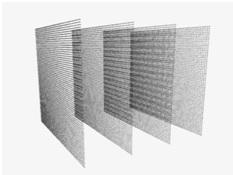
Đčń. 2. Âĺđřčííŕ˙ ďîëčăîíŕëüíŕ˙ ńĺňęŕ
Ěĺňîäčęŕ ďîńňđîĺíč˙ ěíîăîńëîéíîé ďîëčăîíŕëüíîé ńĺňęč ńîńňîčň čç íĺńęîëüęčő ŕëăîđčňěîâ, îáúĺäčíĺííűő â ĺäčíűé ěîäóëü âčçóŕëčçŕöčč îáúĺęňŕ. Ŕëăîđčňě đŕń÷ĺňŕ ďîëîćĺíčé âĺđřčí ďîëčăîíŕëüíîé ńĺňęč ďîçâîë˙ĺň îďđĺäĺëčňü ęîîđäčíŕňű ňî÷ĺę ęŕćäîăî ńëî˙, ďđč÷ĺě îáůĺĺ ęîëč÷ĺńňâî ńëîĺâ ěîćĺň âŕđüčđîâŕňüń˙ â çŕâčńčěîńňč îň íĺîáőîäčěîé äĺňŕëčçŕöčč âčçóŕëüíîăî ďđĺäńňŕâëĺíč˙ 3D îáúĺęňŕ (đčń. 3) č îńíîâűâŕĺňń˙ íŕ đĺŕëčçŕöčč ďîńëĺäîâŕňĺëüíűő ďđîöĺäóđ, čńďîëüçóţůčő â ęŕ÷ĺńňâĺ îńíîâíűő ďŕđŕěĺňđîâ ńëĺäóţůčĺ ďĺđĺěĺííűĺ: i – čäĺíňčôčęŕöčîííűé íîěĺđ, őŕđŕęňĺđčçóţůčé óçĺë ńĺňęč, N – îáůĺĺ ęîëč÷ĺńňâî óçëîâ ňđĺőěĺđíîăî ňĺëŕ, pos – ňđĺőęîěďîíĺíňíűĺ âĺęňîđ, ńîäĺđćŕůčé číôîđěŕöčţ î ęîîđäčíŕňŕő âĺđřčí â ňđĺőěĺđíîě ďđîńňđŕíńňâĺ, âĺęňîđ  , őŕđŕęňĺđčçóţůčé ďîëîćĺíčĺ âĺđřčíű â ďđîńňđŕíńňâĺ. , őŕđŕęňĺđčçóţůčé ďîëîćĺíčĺ âĺđřčíű â ďđîńňđŕíńňâĺ.
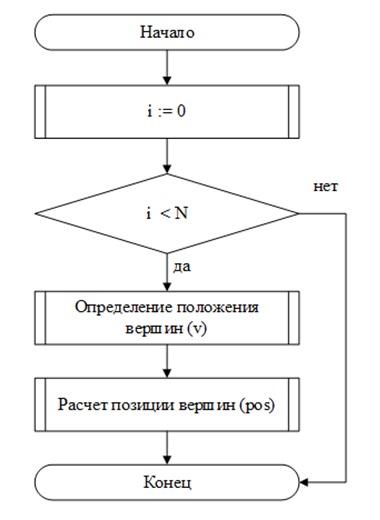
Đčń. 3. Ŕëăîđčňě đŕń÷ĺňŕ ďîëîćĺíčé âĺđřčí ďîëčăîíŕëüíîé ńĺňęč
Ŕëăîđčňě âęëţ÷ŕĺň â ńĺá˙ ďđîöĺäóđű, ďîçâîë˙ţůčĺ â çŕâčńčěîńňč îň ęîëč÷ĺńňâŕ âĺđřčí (âĺëč÷číŕ N), îďčńűâŕţůčő ôîđěó 3D îáúĺęňŕ, ďîëó÷čňü ěŕńńčâ çíŕ÷ĺíčé, ęîňîđűé îďčńűâŕĺň ęîîđäčíŕňű ęŕćäîăî óçëŕ ďîëčăîíŕëüíîé ńĺňęč.
Ŕëăîđčňě âčçóŕëčçŕöčč öčôđîâîăî ęóáŕ äë˙ 3D čçîáđŕćĺíč˙
Ńëĺäóţůčé ŕëăîđčňě ńîńňîčň čç íŕáîđŕ ôóíęöčé ďîçâîë˙ĺň đĺŕëčçîâŕňü âčçóŕëčçŕöčţ öčôđîâîăî ęóáŕ ń ďđčěĺíĺíčĺě îňęđűňîé ăđŕôč÷ĺńęîé áčáëčîňĺęč OpenGL Mathematics [16-18], â ęîňîđîé ďđĺäńňŕâëĺíű îńíîâíűĺ ôóíęöčč îďĺđŕöčé ěŕňđč÷íűő ďđĺîáđŕçîâŕíčé â ňđĺőěĺđíîě ďđîńňđŕíńňâĺ, ÷ňî ďîçâîëčëî čńďîëüçîâŕňü áŕçîâűĺ ěĺňîäű OpenGL äë˙ îňîáđŕćĺíč˙ ňĺęóůĺăî ďîëîćĺíč˙ ďîëčăîíŕëüíîé ńĺňęč ń ó÷ĺňîě ďŕđŕěĺňđîâ ëîęŕöčč â ňđĺőěĺđíîě ďđîńňđŕíńňâĺ (đčń. 4).
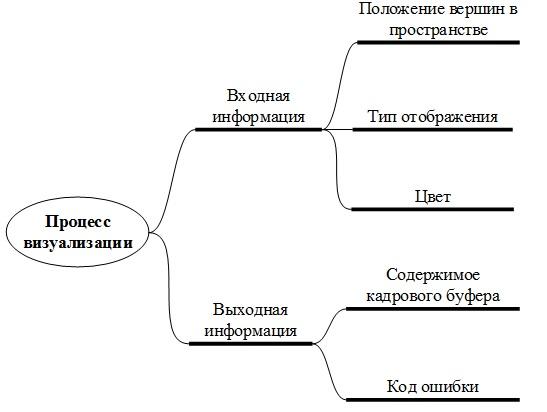
Đčń. 4. Ěĺíňŕëüíŕ˙ ęŕđňŕ ďđîöĺńńŕ âčçóŕëčçŕöčč
Ęîîđäčíŕňű âĺđřčí ęŕćäîăî óçëŕ ďîëčăîíŕëüíîé ńĺňęč ďĺđĺäŕţňń˙ â ôóíęöčţ glBufferData äë˙ äŕëüíĺéřĺăî čńďîëüçîâŕíč˙. Ŕëăîđčňě đŕáîňű ôóíęöčč çŕęëţ÷ŕĺňń˙ â ńëĺäóţůĺě: âűäĺë˙ĺňń˙ ó÷ŕńňîę ďŕě˙ňč íŕ ăđŕôč÷ĺńęîě óńňđîéńňâĺ, ęîňîđűé çŕďîëí˙ĺňń˙ ďĺđĺäŕííűě ěŕńńčâîě ęîîđäčíŕň âĺđřčí. ×ŕńňč÷íîĺ îáíîâëĺíčĺ äŕííűő âčäĺîďŕě˙ňč äîńňčăŕĺňń˙ ń ďîěîůüţ ôóíęöčč glBufferSubData, â ęîňîđîé çŕäŕĺňń˙ äčŕďŕçîí äë˙ čçěĺíĺíč˙ ďŕđŕěĺňđîâ. Ďîńëĺ ÷ĺăî âűçűâŕĺňń˙ ôóíęöč˙ glDrawArrays, â ęîňîđóţ ďĺđĺäŕţňń˙ ńëĺäóţůčĺ ďŕđŕěĺňđű: ňčď îňîáđŕćŕĺěîăî ďđčěčňčâŕ, číäĺęńű ăđŕíčö äčŕďŕçîíŕ ěŕńńčâŕ.  đĺçóëüňŕňĺ ôîđěčđóĺňń˙ čňîăîâîĺ čçîáđŕćĺíčĺ â ďŕě˙ňč ęŕäđîâîăî áóôĺđŕ, âűâîä ęîňîđîăî, îńóůĺńňâë˙ĺňń˙ ń ďîěîůüţ ôóíęöčč glSwapBuffers. Äë˙ âčçóŕëčçŕöčč čçîáđŕćĺíč˙ ňŕę ćĺ čńďîëüçóĺňń˙ ŕďďŕđŕňíűé óńęîđčňĺëü, ďîäđŕçóěĺâŕţůčé čńďîëüçîâŕíčĺ ăđŕôč÷ĺńęîăî óńęîđčňĺë˙. Ńóňü äŕííîăî ŕëăîđčňěŕ çŕęëţ÷ŕĺňń˙ â ńëĺäóţůĺě – ďîääĺđćęŕ ěíîăîďîňî÷íîńňč ěĺćäó öĺíňđŕëüíűě č ăđŕôč÷ĺńęčě ďđîöĺńńîđŕěč, ďĺđâűé čç ęîňîđűő âűďîëí˙ĺň îň îäíîăî äî äâóő ďîňîęîâ âű÷čńëĺíčé íŕ îäíî ďđîöĺńńîđíîĺ ˙äđî, ŕ âňîđîé ěîćĺň ďîääĺđćčâŕňü íĺńęîëüęî ňűń˙÷ ďîňîęîâ íŕ ęŕćäűé ěóëüňčďđîöĺńńîđ. Čńďîëüçîâŕíčĺ ăđŕôč÷ĺńęîăî ďđîöĺńńîđŕ ďîçâîë˙ĺň ńíčçčňü íŕăđóçęó íŕ öĺíňđŕëüíűé ďđîöĺńńîđ, íî â ýňîě ńëó÷ŕĺ íĺîáőîäčěî ó÷čňűâŕňü, ÷ňî ńęîđîńňü ďĺđĺäŕ÷č äŕííűő ěĺćäó öĺíňđŕëüíűě č ăđŕôč÷ĺńęčě ďđîöĺńńîđŕěč îăđŕíč÷ĺííŕ č ńëĺäóĺň ďđŕâčëüíî đŕńďđĺäĺë˙ňü íŕăđóçęó ěĺćäó íčěč.
Îáůŕ˙ ńőĺěŕ đŕáîňű ěîäóë˙ âčçóŕëčçŕöčč ďđĺäńňŕâëĺíŕ íŕ đčńóíęĺ 5.
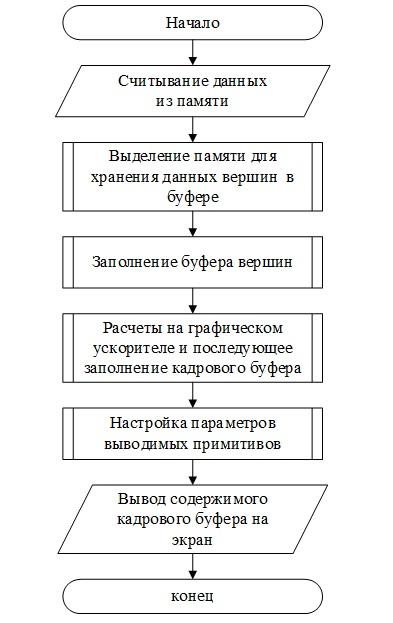
Đčń. 5. Ŕëăîđčňě đŕáîňű ěîäóë˙ âčçóŕëčçŕöčč
Äë˙ ďđĺîáđŕçîâŕíč˙ č őđŕíĺíč˙ číôîđěŕöčč î ďîçčöč˙ő âĺđřčí đŕçđŕáîňŕíŕ ńňđóęňóđŕ, ďîçâîë˙ţůŕ˙ ŕäŕďňčđîâŕňü äŕííűĺ â ôîđěŕň, čńďîëüçóĺěűé ďđč âčçóŕëčçŕöčč, ęîňîđűé çŕâčńčň îň ńďĺöčôčęč ďđîăđŕěěíîăî číňĺđôĺéńŕ ńčńňĺěű. Ńňđóęňóđŕ ďđĺäńňŕâë˙ĺň ńîáîé îäíîěĺđíűé ěŕńńčâ äŕííűő đŕçěĺđíîńňüţ (3*N) (đčń. 6).
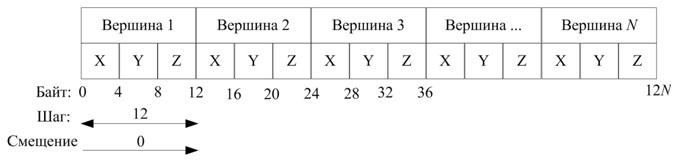
Đčń. 6. Ńőĺěŕ ńňđóęňóđű őđŕíĺíč˙ číôîđěŕöčč î ęîîđäčíŕňŕő âĺđřčí ďîëčăîíŕëüíîé ńĺňęč
Âĺđřčíű, ńîńňŕâë˙ţůčĺ ďîëčăîíŕëüíóţ ńĺňęó, îďčńűâŕţňń˙ íŕáîđîě ňđĺőěĺđíűő ęîîđäčíŕň (x, y, z), îďđĺäĺë˙ţůčě čő ňî÷íîĺ ďîëîćĺíčĺ â âčđňóŕëüíîě ďđîńňđŕíńňâĺ öčôđîâîăî ęóáŕ. Őđŕíĺíčĺ číôîđěŕöčč îđăŕíčçîâŕíî â ôîđěŕňĺ ěŕńńčâŕ, äë˙ ęŕćäîăî ýëĺěĺíňŕ ęîňîđîăî ňđĺáóĺňń˙ ęŕę ěčíčěóě 12 áŕéň. Číčöčŕëčçŕöč˙ âńĺé ńňđóęňóđű öčôđîâîăî ęóáŕ íŕ÷číŕĺňń˙ ń îďđĺäĺëĺíč˙ ěĺńňîďîëîćĺíč˙ ďĺđâîé âĺđřčíű îňíîńčňĺëüíî ýęđŕííîăî ďđîńňđŕíńňâŕ âčçóŕëüíîé ôîđěű ďđîăđŕěěű ń ó÷ĺňîě ńěĺůĺíč˙ îňíîńčňĺëüíî íŕ÷ŕëŕ áóôĺđŕ ďŕě˙ňč, çíŕ÷ĺíčĺ ęîňîđîăî äë˙ ńŕěîăî ěŕńńčâŕ áóäĺň đŕâíűě íóëţ.
Ŕëăîđčňě ăĺíĺđŕöčč öčôđîâîăî ęóáŕ âęëţ÷ŕĺň ýňŕď ń÷čňűâŕíč˙ äŕííűő čç ďŕě˙ňč äë˙ ďîëó÷ĺíč˙ ęîîđäčíŕň ÷ŕńňčö čç ńňđóęňóđű őđŕíĺíč˙ äŕííűő 3D ęóáŕ. Ôóíęöčîíŕëüíŕ˙ ńőĺěŕ đŕáîňű ŔĐŃ ďđčâĺäĺíŕ íŕ đčń. 7.
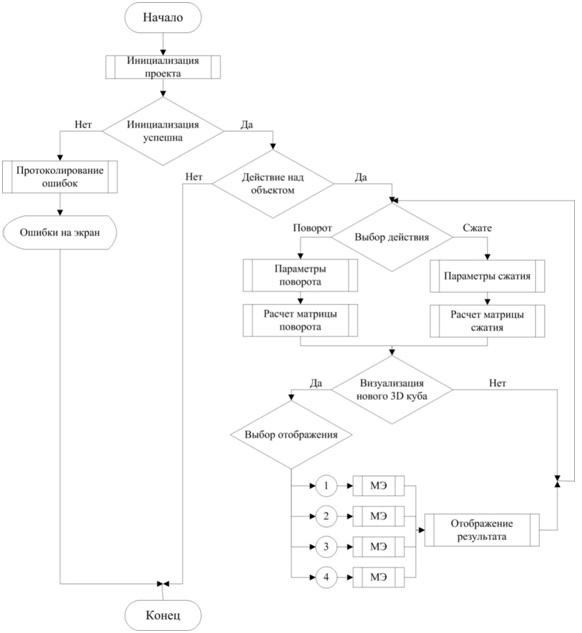
Đčń. 7. Ôóíęöčîíŕëüíŕ˙ ńőĺěŕ đŕáîňű ďđîăđŕěěíîăî ěîäóë˙ äë˙ ňđŕíńôîđěŕöčč č âčçóŕëčçŕöčč âčđňóŕëüíîăî îáúĺęňŕ
Íŕ đčń. 7 ââĺäĺíű îáîçíŕ÷ĺíč˙: ĚÝ – ďđîöĺäóđŕ ěŕńřňŕáčđîâŕíč˙ ýęđŕíŕ; 1 – 4 – îäčí čç âčäîâ ďđĺîáđŕçîâŕíč˙ ďîâîđîňŕ čëč ńćŕňč˙.
Ďĺđńďĺęňčâű đŕçâčňč˙ ďđîĺęňŕ
Ńëĺäóĺň îňěĺňčňü, ÷ňî äŕëüíĺéřŕ˙ đŕçđŕáîňęŕ ňđĺíŕćĺđŕ-ýěóë˙ňîđŕ ÓÇČ ŕďďŕđŕňŕ äë˙ îáó÷ĺíč˙ ńňóäĺíňîâ ěĺäčöčíńęčő âóçîâ âęëţ÷čň âńĺ ŕëăîđčňěű, îďčńŕííűĺ â ńňŕňüĺ. Îíŕ áóäĺň äîďîëíĺíŕ ěîäóëĺě äë˙ ôîđěčđîâŕíč˙ äčíŕěč÷ĺńęčő ěŕńńčâîâ čńőîäíűő äŕííűő ďî ôîňîđ˙äó ń âîçěîćíîńňüţ ďîńňđîĺíč˙ îáúĺęňŕ č ĺăî ňđŕíńôîđěŕöčč: čçěĺíĺíčţ đŕçěĺđîâ, ěŕńřňŕáčđîâŕíčţ č ďîâîđîňó. Čńőîäíűé îáúĺęň áóäĺň ďđĺäńňŕâë˙ĺň ńîáîé íŕáîđ ďëîńęčő čçîáđŕćĺíčé, óďîđ˙äî÷ĺííűő ďî âđĺěĺíč čő ďîëó÷ĺíč˙ çŕ îäčí ďđîőîä äŕň÷čęîâ ŕďďŕđŕňŕ ÓÇČ. Ďîëó÷ĺíčĺ ňŕęîăî ěŕńńčâŕ äŕííűő ďîçâîëčň ńôîđěčđîâŕňü 3D čçîáđŕćĺíčĺ ďóňĺě ńčíňĺçŕ ďëîńęčő ăđŕôč÷ĺńęčő îáëŕńňĺé ń ďîńëĺäóţůĺé ńáîđęîé â ôîđěŕňĺ öčôđîâîăî ęóáŕ. Ďđčěĺđ ęîíńîëčäŕöčč ďëîńęčő čçîáđŕćĺíčé đĺŕëüíîăî îáúĺęňŕ ń âîçěîćíîńňüţ đŕńęđűňč˙ âíóňđĺííĺé ńňđóęňóđű öčôđîâîăî ęóá ďđčâĺäĺí íŕ đčń. 8. Îďčńŕíčĺ ňĺőíîëîăčč ďîëó÷ĺíč˙ âčđňóŕëüíîăî îáúĺęňŕ ďëŕíčđóĺňń˙ â ďîńëĺäóţůčő đŕáîňŕő.

Đčń. 8. Ńőĺěŕ ăĺíĺđŕöčč öčôđîâîăî ęóáŕ
Ńëĺäóĺň îňěĺňčňü, ÷ňî íŕ ďĺđâîě ýňŕďĺ đĺŕëčçŕöčč ďđîĺęňŕ ďî ńîçäŕíčţ ňđĺíŕćĺđŕ-ýěóë˙ňîđŕ ÓÇČ ŕďďŕđŕňŕ áűë đŕçđŕáîňŕí ěîäóëü, ďîçâîë˙ţůčé âűďîëí˙ňü äĺôîđěŕöčţ öčôđîâîăî ęóáŕ, ňĺîđĺňč÷ĺńęčĺ ŕńďĺęňű ŕëăîđčňěîâ ęîňîđîăî îńíîâŕíű íŕ čńďîëüçîâŕíčč ôčçč÷ĺńęčő çŕęîíîâ, ňŕęčő ęŕę çŕęîí Ăóęŕ č âňîđîé çŕęîí Íüţňîíŕ.  đĺçóëüňŕňĺ âčçóŕëčçčđîâŕíî čçěĺíĺíčĺ ôîđěű ďîëčăîíŕëüíîé ńĺňęč ďđč čěčňŕöčč âîçäĺéńňâč˙ âíĺříĺé ńčëű íŕ îáúĺęň, ňî ĺńňü, ďđĺäńňŕâëĺí ďđîöĺńń äĺôîđěŕöčč â öĺëîě čëč ďî âűáđŕííűě óçëŕě (đčń. 9). Äŕëüíĺéřĺĺ čńďîëüçîâŕíčĺ ďđĺäńňŕâëĺííîăî ěîäóë˙ ďîçâîëčň âűďîëíčňü đĺŕëčçŕöčţ čěčňŕöčč âîçäĺéńňâč˙ äćîéńňčęŕ ŕďďŕđŕňŕ ÓÇČ íŕ ě˙ăęčĺ ňęŕíč ďîâĺđőíîńňč ÷ĺëîâĺ÷ĺńęîăî ňĺëŕ ń âîçěîćíîńňüţ ęîíňđîë˙ ńčëű âîçäĺéńňâč˙, ÷ňî ďîçâîëčň ďđč îáó÷ĺíčč ńňóäĺíňîâ-ěĺäčęîâ ęîíňđîëčđîâŕňü ńňĺďĺíü íŕćŕňč˙ íŕ äćîéńňčę č ďđĺäîňâđŕňčňü âîçěîćíîńňü áîëĺâîăî îůóůĺíč˙ ó ďŕöčĺíňŕ ďđč îáńëĺäîâŕíčč ń čńďîëüçîâŕíčĺě ŕďďŕđŕňŕ ÓÇČ.
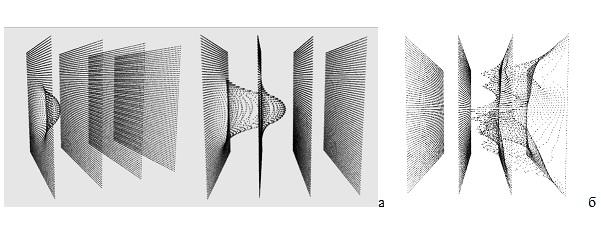
Đčńóíîę 9 – Âčçóŕëčçŕöč˙ ďđîöĺńńŕ äĺôîđěŕöčč: ŕ – âčçóŕëčçŕöč˙ ďđîöĺńńŕ äĺôîđěŕöčč; á – äĺôîđěŕöč˙ ňĺëŕ ďî âűáđŕííűě óçëŕě
Ńëĺäóĺň îňěĺňčňü, ÷ňî đĺŕëčçŕöč˙ ďđîăđŕěěíîăî ěîäóë˙ âčçóŕëčçŕöčč 3D öčôđîâîăî ęóáŕ âűďîëíĺíŕ ń čńďîëüçîâŕíčĺě ˙çűęŕ ďđîăđŕěěčđîâŕíč˙ C++; ôóíęöčé č ďđîöĺäóđ áčáëčîňĺęč OpenGL, íĺ çŕâčń˙ůĺé îň ďëŕňôîđěű ďđîăđŕěěíîăî číňĺđôĺéńŕ äë˙ ďđčëîćĺíčé, čńďîëüçóţůčő äâóěĺđíóţ č ňđ¸őěĺđíóţ ęîěďüţňĺđíóţ ăđŕôčęó; ęđîńń-ďëŕňôîđěĺííîé áčáëčîňĺęč Qt ôčđěű TrollTech äë˙ ńîçäŕíč˙ ăđŕôč÷ĺńęčő ďîëüçîâŕňĺëüńęčő číňĺđôĺéńîâ (GUI). Ýňŕ áčáëčîňĺęŕ ďîëíîńňüţ îáúĺęňíî-îđčĺíňčđîâŕííŕ˙, ÷ňî îáĺńďĺ÷čâŕĺň ëĺăęîĺ đŕńřčđĺíčĺ âîçěîćíîńňĺé č ńîçäŕíčĺ íîâűő ęîěďîíĺíňîâ.
Çŕęëţ÷ĺíčĺ
 đĺçóëüňŕňĺ đĺŕëčçŕöčč ďĺđâîăî ýňŕďŕ ďđîĺęňŕ áűëč đŕçđŕáîňŕíű ŕëăîđčňěű, ďîçâîë˙ţůčĺ ďîńňđîčňü ďîëčăîíŕëüíóţ ńĺňęó äë˙ ďđĺäńňŕâëĺíč˙ 3D îáúĺęňŕ â âčäĺ öčôđîâîăî ęóáŕ, đĺŕëčçîâŕíű ńňđóęňóđű äë˙ őđŕíĺíč˙ č äŕëüíĺéřĺăî čńďîëüçîâŕíč˙ âńĺé íĺîáőîäčěîé číôîđěŕöčč, ŕ ňŕę ćĺ ńăĺíĺđčđîâŕí ěîäóëü, ďîçâîë˙ţůčé âűďîëíčňü âčçóŕëčçŕöčţ čçěĺíĺíč˙ ôîđěű îáúĺęňŕ ďđč äĺôîđěŕöčč, âűçâŕííîé âîçäĺéńňâčĺě âíĺříĺé ńčëű íŕ íĺăî. Ďđĺäńňŕâëĺííűĺ ŕëăîđčňěű ďîçâîë˙ň â äŕëüíĺéřĺě ńďđîĺęňčđîâŕňü č đĺŕëčçîâŕňü ďđîăđŕěěíîĺ îáĺńďĺ÷ĺíčĺ äë˙ ňđĺíŕćĺđŕ-ýěóë˙ňîđŕ ŕďďŕđŕňŕ ÓÇČ. Ďĺđńďĺęňčâíűěč íŕďđŕâëĺíč˙ěč đŕçâčňč˙ ďđîĺęňŕ ˙âë˙ţňń˙:
– ŕâňîěŕňč÷ĺńęčé ŕíŕëčç ďîëó÷ŕĺěîăî čçîáđŕćĺíč˙, ďđĺäńňŕâëĺííîăî â ôîđěŕňĺ đ˙äŕ ôîňîńíčěęîâ, ďî đĺçóëüňŕňŕě ęîňîđîăî îďđĺäĺë˙ĺňń˙ ńňđóęňóđŕ 3D îáúĺęňŕ;
– ďîńňđîĺíčĺ 3D čçîáđŕćĺíč˙ ăđŕôč÷ĺńęîăî îáúĺęňŕ íŕ îńíîâĺ ŕíŕëčçŕ ĺăî ôîňîčçîáđŕćĺíč˙ â ôîđěŕňĺ öčôđîâîăî ęóáŕ;
– đĺŕëčçŕöč˙ ŕëăîđčňěîâ, ďîçâîë˙ţůčő îňîáđŕćŕňü ňđŕíńôîđěŕöčţ ďîńňđîĺííîăî 3D îáúĺęňŕ ń äĺňŕëüíűě îňîáđŕćĺíčĺě âńĺő čçěĺíĺíčé ďđč ďîâîđîňĺ, äĺôîđěŕöčč č ěŕńřňŕáčđîâŕíčč.
References
1. Khan M.D., Ignatenko A.V. Osnovannye na izobrazheniyakh sposob predstavleniya i vizualizatsii trekhmernogo ob''ekta i sposob predstavleniya i vizualizatsii animirovannogo ob''ekta. Patent na izobretenie RU 2216781 C2, 20.11.2003. Zayavka ą 2001118221/09 ot 29.06.2001.
2. Supel' A., Khvostov P.M., Ignat'ev K.E. Otsenka effektivnosti proektirovaniya trekhmernykh poligonal'nykh modelei kak sposoba vizualizatsii illyustrativnoi informatsii // Sovremennye informatsionnye tekhnologii: sb. tr. 5-oi Vser. nauch.-tekhn. konf, M.: OOO «Nauchnyi konsul'tant», 2019. S. 115-120.
3. Ksenofontov S. Yu. Sposob trekhmernoi vizualizatsii vnutrennei struktury issleduemogo ob''ekta v real'nom vremeni. Patent na izobretenie RU 2681348 C1, 06.03.2019. Zayavka ą 2018114616 ot 19.04.2018
4. Blokhinov Yu.B., Verkeenko M.S. Algoritmy postroeniya tsifrovykh trekhmernykh modelei unikal'nykh ob''ektov. // Izvestiya Rossiiskoi akademii nauk. Teoriya i sistemy upravleniya. 2011. ą 4. S. 118-131.
5. Gorodnichev M.G., Gematudinov R.A., Kukharenko A.M. O nekotorykh metodakh vizualizatsii dinamicheskikh 3D modelei // Ekonomika i kachestvo sistem svyazi. 2018. ą1(7). S 18-29.
6. Aleksanyan G.K., Shcherbakov I.D., Kucher A.I. Programma vizualizatsii vnutrennikh struktur issleduemogo ob''ekta metodom elektroimpedansnoi tomografii (Vizualizatsiya 3D-EIT1). Svidetel'stvo o registratsii programmy dlya EVM RU 2018666295, 13.12.2018. Zayavka ą 2018662721 ot 13.11.2018.
7. Zhilyakov E.G., Likhosherstnyi A.Yu. Arkhitektura neiroseti v zadache pretsedentnogo raspoznavaniya ob''ektov na izobrazheniyakh s ispol'zovaniem chastotnykh priznakov // Voprosy radioelektroniki. 2013. T. 4. ą 1. S. 35-45.
8. Bagutdinov R.A. Ideya mnogorakursnoi sistemy tekhnicheskogo zreniya dlya formirovaniya 3D-modelei poverkhnosti ob''ekta v zadachakh razrabotki mobil'nykh robotov //Programmnye sistemy i vychislitel'nye metody. 2017. ą 4. S. 1-6.
9. Osintsev A.V., Ochkov K.Yu. Vizualizatsiya peremeshchenii i deformatsii metodom tsifrovoi korrelyatsii izobrazhenii // Nauchnaya vizualizatsiya. 2016 . T. 8. ą 2. S. 15-23.
10. Bugakova T.Yu. Trekhmernoe modelirovanie deformatsii inzhenernogo ob''ekta metodom splain-interpolyatsii // Vestnik SGUGIT (Sibirskogo gosudarstvennogo universiteta geosistem i tekhnologii). Novosibirsk. 2019. S. 96-105.
11. Kravchenko A.M., Semerenko I.P., Ikama D.L. Modelirovanie i vizualizatsiya napryazhenno-deformirovannogo sostoyaniya mekhanicheskikh sistem v usloviyakh sovremennoi obrazovatel'noi sredy // Nauchnyi rezerv. 2019. ą 4 (8). S. 92-98.
12. Koznov D.V., Larchik E.V.1, Terekhov A.N. Transformatsiya dinamicheskikh predstavlenii v predmetno-orientirovannom vizual'nom modelirovanii // Programmirovanie. 2015 . ą 4. S. 3-12.
13. Bagutdinov R.A. Ideya mnogorakursnoi sistemy tekhnicheskogo zreniya dlya formirovaniya 3D-modelei poverkhnosti ob''ekta v zadachakh razrabotki mobil'nykh robotov //Programmnye sistemy i vychislitel'nye metody. 2017. ą 4. S. 1-6.
14. Litvinova Yu.S., Maksimenko-Sheiko K.V. // Analiticheskaya identifikatsiya trekhmernykh geometricheskikh ob''ektov po informatsii o forme ikh sechenii. Problemy mashinostroeniya. 2017. T. 20. ą 1. S. 45-51.
15. Glaz A.B., Timukhin A.A. Vosstanovlenie 3d poverkhnosti lits na baze iskhodnykh 2D izobrazhenii // Matematicheskie metody raspoznavaniya obrazov. 2005. T. 12. ą 1. S. 69-72.
16. D'yakonov V.P. Entsiklopediya komp'yuternoi algebry. M.: DMK. 2018. Press. 1257s.
17. Bastov G.A. Tekhnologii graficheskoi transformatsii ob''ektov v usloviyakh ispol'zovaniya komp'yuternoi grafiki // Dizain i tekhnologii. 2016. ą 51 (93). S. 6-12.
18. Ginsburg, D. OpenGL ES 3.0. Rukovodstvo razrabotchika. M.: DMK Press. 2015. 448s.
|








