|
Software systems and computational methods
Reference:
Varepo L., Khomchenko V.G., Glukhov V.I., Pritykin F.N., Krivokhat'ko E.A.
Geometric modeling of the hinged mechanisms in the third class of cyclic automatic machines for moving working bodies with approximate stops in two extreme positions.
// Software systems and computational methods.
2017. ą 2.
P. 67-75.
DOI: 10.7256/2454-0714.2017.2.22719 URL: https://en.nbpublish.com/library_read_article.php?id=22719
Geometric modeling of the hinged mechanisms in the third class of cyclic automatic machines for moving working bodies with approximate stops in two extreme positions.
Varepo Larisa
Doctor of Technical Science
Professor, Omsk State Technical University
644050, Russia, Omskaya oblast', g. Omsk, prospekt Mira, 11

|
larisavarepo@yandex.ru
|
|
 |
Other publications by this author
|
|
Khomchenko Vasilii Gerasimovich
Doctor of Technical Science
Professor, Department of Automation and Robotics, Omsk State Technical University
644050, Russia, g. Omsk, pr. Mira, 11
|
|
v_khomchenko@mail.ru
|
|
|
Other publications by this author
|
|
Glukhov Vladimir Ivanovich
Doctor of Technical Science
Professor, Department of Oil and Gas, Standardization and Metrology, Omsk State Technical University
644050, Russia, g. Omsk, pr.Mira, 11
|
|
mips@omgtu.ru
|
|
|
Other publications by this author
|
|
Pritykin Fedor Nikolaevich
Doctor of Technical Science
Professor, Department of Engineering Geometry and CAD, Omsk State Technical University
644050, Russia, g. Omsk, pr. Mira, 11
|
|
pritykin@mail.ru
|
|
|
Other publications by this author
|
|
|
Krivokhat'ko Ekaterina Aleksandrovna
Assistant, Omsk State Technical University
644050, Russia, g. Omsk, pr. Mira, 11
|
|
katusa23@mail.ru
|
|
|
|
DOI: 10.7256/2454-0714.2017.2.22719
Received:
18-04-2017
Published:
19-06-2017
Abstract:
The objects of the study are articulated lever mechanisms based on the use of third-order third-class structural groups by the Assur-Artobolevsky classification. These mechanisms are studied and designed as actuators of high-performance machines. Of the many lever mechanisms of the third class, the so-called limit-forming mechanisms are singled out to become the object of studies, making it possible to obtain approximate outgrade of the output link, and, consequently, of the working tool by using the limit positions of the lever diads. The third class articulated lever mechanisms of the third class are being analyze, due to their kinematic features these mechanisms allow to provide approximate out-riggers of the output link in both its extreme positions in accordance with the preassigned operating schedule of the machine.The method of the study of hinged mechanisms with approximate stops of the out-put link in the two extreme positions according to the given cyclogram is the method of constructive geometric modeling as the basis for the development of an analytical geomet-ric model of the mechanisms under consideration. Based upon the constructive geometric modeling the authors propose the method for designing six-link mechanisms of the third class with two approximate stops of the output link in the extreme positions according to the preassigned cyclogram. Possible branching of the kinematic scheme of this mechanism is revealed. An analytical geometric model for the synthesis of six-link hinged mechanisms of the third class as executive devices for high-performance machines for printing, food, textile and a number of other industries has been created by the authors.
Keywords:
cyclogram, branching, geometric construction, working body, Chebyshev approximation, free parameters, dwells, kinematic scheme, hinged mechanism, Geometric modeling
Ââĺäĺíčĺ
 öčęëîâűő ěŕřčíŕő-ŕâňîěŕňŕő âűńîęîé ďđîčçâîäčňĺëüíîńňč â ęŕ÷ĺńňâĺ čńďîëíčňĺëüíűő ěĺőŕíčçěîâ íŕřëč řčđîęîĺ ďđčěĺíĺíčĺ đű÷ŕćíűĺ ěĺőŕíčçěű [1- 7]. Îäíŕęî, ęŕę ďđŕâčëî, îíč čńďîëüçóţňń˙ äë˙ đĺŕëčçŕöčč öčęëîăđŕěě, â ęîňîđűő đŕáî÷čé îđăŕí, ńîâĺđřŕ˙ âîçâđŕňíî-âđŕůŕňĺëüíűĺ čëč âîçâđŕňíî-ďîńňóďŕňĺëüíűĺ äâčćĺíč˙, â ęđŕéíčő ďîëîćĺíč˙ő čěĺĺň ěăíîâĺííűĺ îńňŕíîâęč [4]. Ĺńëč ćĺ ňđĺáóĺňń˙ ďĺđĺěĺůŕňü đŕáî÷čé îđăŕí ń îńňŕíîâęŕěč â îäíîě čëč â äâóő ęđŕéíčő ďîëîćĺíč˙ő, ňî ďđĺäďî÷ňĺíčĺ îňäŕĺňń˙ ęóëŕ÷ęîâűě ěĺőŕíčçěŕě, íĺńěîňđ˙ íŕ đ˙ä čő ńóůĺńňâĺííűő íĺäîńňŕňęîâ, îăđŕíč÷čâŕţůčő đŕáîňó öčęëîâűő ěŕřčí-ŕâňîěŕňîâ íŕ âűńîęčő ńęîđîńň˙ő.
 ďîńëĺäíčĺ äĺń˙ňčëĺňč˙ â ęŕ÷ĺńňâĺ ŕëüňĺđíŕňčâű ęóëŕ÷ęîâűě ěĺőŕíčçěŕě äîńňŕňî÷íî ŕęňčâíî âĺäóňń˙ đŕçđŕáîňęč đű÷ŕćíűő ěĺőŕíčçěîâ, îáĺńďĺ÷čâŕţůčő đŕáî÷ĺěó îđăŕíó ďđčáëčćĺííűĺ âűńňîč ęîíĺ÷íîé ďđîäîëćčňĺëüíîńňč, ęŕę â îäíîě, ňŕę č â äâóő ęđŕéíčő ďîëîćĺíč˙ő [1, 3-7]. Ýňî ńâ˙çŕíî ń áîëĺĺ âűńîęîé íŕăđóçî÷íîé ńďîńîáíîńňüţ đű÷ŕćíűő ěĺőŕíčçěîâ č ďđîńňűě đĺřĺíčĺě ďđîáëĺěű íĺđŕçđűâíîńňč ęčíĺěŕňč÷ĺńęčő öĺďĺé ďî ńđŕâíĺíčţ ń ęóëŕ÷ęîâűěč ěĺőŕíčçěŕěč.
Ń ďîěîůüţ đű÷ŕćíűő ěĺőŕíčçěîâ íŕčáîëĺĺ ďđîńňî đĺŕëčçóţňń˙ öčęëîăđŕěěű ń âűńňîĺě â îäíîě čç ęđŕéíčő ďîëîćĺíčé. Äë˙ ýňîăî äîńňŕňî÷íî čńďîëüçîâŕňü řĺńňčçâĺííűĺ ěĺőŕíčçěű âňîđîăî ęëŕńńŕ ďî ęëŕńńčôčęŕöčč Ŕńńóđŕ-Ŕđňîáîëĺâńęîăî, â ęîňîđűő čńőîäíűé ÷ĺňűđĺőçâĺííčę ďđĺäńňŕâë˙ĺň ńîáîé ëčáî íŕďđŕâë˙ţůčé ěĺőŕíčçě[8], ëčáî âűďîëí˙ĺň đîëü đŕńďđĺäĺëĺíč˙ óăëîâ ďîâîđîňŕ ęđčâîřčďŕ íŕ çŕäŕííűĺ öčęëîăđŕěěîé óăëű ďđ˙ěîăî č îáđŕňíîăî őîäŕ č óăëű âűńňî˙ [1]. Ďđčńîĺäčí˙ĺěűĺ đű÷ŕćíűĺ äčŕäű ďđîĺęňčđóţňń˙ č â ňîě č â äđóăîě ńëó÷ŕ˙ő ďî óńëîâčţ îđăŕíčçŕöčč ďđčáëčćĺííîé îńňŕíîâęč âűőîäíîăî çâĺíŕ ěĺőŕíčçěŕ ń ňđĺáóĺěîé ňî÷íîńňüţ.
Îńíîâîé ńčíňĺçŕ đű÷ŕćíűő ěĺőŕíčçěîâ, â ňîě ÷čńëĺ č đű÷ŕćíűő ěĺőŕíčçěîâ ń âűńňîĺě âűőîäíîăî çâĺíŕ â îäíîě č/čëč äâóő ęđŕéíčő ďîëîćĺíč˙ő, íŕ ďđîň˙ćĺíčč äëčňĺëüíîăî âđĺěĺíč, ˙âë˙ţňń˙, ęŕę ďđŕâčëî, ěĺňîäű ăĺîěĺňđč÷ĺńęîăî ěîäĺëčđîâŕíč˙ [9-15]. Ýňî ńâ˙çŕíî ń ňĺě, ÷ňî ěĺňîäű ăĺîěĺňđč÷ĺńęîăî ěîäĺëčđîâŕíč˙ ˙âë˙ţňń˙ íŕčáîëĺĺ ďîäőîä˙ůčě ŕďďŕđŕňîě äë˙ âčçóŕëüíîăî âűńňđŕčâŕíč˙ ëîăčęč ďîëó÷ĺíč˙ đŕńńěŕňđčâŕĺěűő ěĺőŕíčçěîâ ń ňđĺáóĺěűěč ôóíęöčîíŕëüíűěč âîçěîćíîńň˙ěč.
 äŕííîé đŕáîňĺ ďđîöĺńń ďđîĺęňčđîâŕíč˙ řŕđíčđíűő ěĺőŕíčçěîâ ňđĺňüĺăî ęëŕńńŕ ń ďđčáëčćĺííűěč îńňŕíîâęŕěč âűőîäíîăî çâĺíŕ â äâóő ęđŕéíčő ďîëîćĺíč˙ő ńâîäčňń˙, ďî ńóňč, ę ďîńëĺäîâŕňĺëüíîěó ăĺîěĺňđč÷ĺńęîěó ńčíňĺçó ěĺőŕíčçěŕ îň čçâĺńňíűő őŕđŕęňĺđíűő ďîëîćĺíčé âőîäíîăî çâĺíŕ ěĺőŕíčçěŕ ę ňđĺáóĺěűě ďî öčęëîăđŕěěĺ ěŕřčíű-ŕâňîěŕňŕ ďîëîćĺíč˙ě âűőîäíîăî.
Ďîńňŕíîâęŕ çŕäŕ÷č
Îáĺńďĺ÷ĺíčĺ îńňŕíîâîę âűőîäíîăî çâĺíŕ â äâóő ęđŕéíčő ďîëîćĺíč˙ő đű÷ŕćíűěč ěĺőŕíčçěŕěč ďđč čńďîëüçîâŕíčč řŕňóííűő ęđčâűő ňđĺáóĺň ďîčńęŕ ďîäőîä˙ůčő ÷ĺňűđĺőçâĺííűő ěĺőŕíčçěîâ â äîńňŕňî÷íî îăđŕíč÷ĺííîé îáëŕńňč č ń âĺńüěŕ îăđŕíč÷ĺííűěč âîçěîćíîńň˙ěč [8].  ńëó÷ŕĺ čńďîëüçîâŕíč˙ äë˙ ďîëó÷ĺíč˙ âűńňîĺâ ďđĺäĺëüíűő ďîëîćĺíčé ěĺőŕíčçěŕ îáű÷íî ďđčěĺí˙ţň âîńüěčçâĺííűĺ ěĺőŕíčçěű âňîđîăî ęëŕńńŕ ń ďîńëĺäîâŕňĺëüíűě ďđčńîĺäčíĺíčĺě đű÷ŕćíűő äčŕä [1].
Âî âňîđîé ďîëîâčíĺ ďđîřëîăî âĺęŕ íĺěĺöęčé ó÷ĺíűé Ę. Őŕéí [4] âďĺđâűĺ ďđĺäëîćčë ęčíĺěŕňč÷ĺńęóţ ńőĺěó řĺńňčçâĺííîăî ěĺőŕíčçěŕ ňđĺňüĺăî ęëŕńńŕ, ďîçâîë˙ţůóţ ďîëó÷ŕňü âűńňîč đŕáî÷ĺăî îđăŕíŕ ęîíĺ÷íîé ďđîäîëćčňĺëüíîńňč â äâóő ęđŕéíčő ďîëîćĺíč˙ő.  đĺçóëüňŕňĺ ďî˙âčëŕńü âîçěîćíîńňü äë˙ ďîëó÷ĺíč˙ âűńňîĺâ â äâóő ęđŕéíčő ďîëîćĺíč˙ő čńďîëüçîâŕňü áîëĺĺ ďđîńňűĺ đű÷ŕćíűĺ ěĺőŕíčçěű ń řĺńňüţ çâĺíü˙ěč. Îäíŕęî ěĺňîä, ďđĺäëîćĺííűé Ę. Őŕéíîě, îáĺńďĺ÷čâŕë âűńňîč â ďĺđčîäű, íĺ ńîăëŕńîâŕííűĺ ń ňđĺáóĺěîé öčęëîăđŕěěîé ěŕřčíű-ŕâňîěŕňŕ, ÷ňî ďđčâîäčëî ę íĺîáőîäčěîńňč ęîđđĺęňčđîâŕňü ďî âîçěîćíîńňč öčęëîăđŕěěó č, ńëĺäîâŕňĺëüíî, đŕáîňó äđóăčő čńďîëíčňĺëüíűő îđăŕíîâ, ÷ňî ĺńňĺńňâĺííî îăđŕíč÷čâŕëî ďđčěĺíĺíčĺ ňŕęčő ěĺőŕíčçěîâ â číćĺíĺđíîé ďđŕęňčęĺ, íĺńěîňđ˙ íŕ čő ďîňĺíöčŕëüíűĺ âîçěîćíîńňč.
 đŕáîňŕő [1,3,5-7] áűë ďđĺäëîćĺí ŕíŕëčňč÷ĺńęčé ěĺňîä ńčíňĺçŕ ňŕęčő řĺńňčçâĺííűő đű÷ŕćíűő ěĺőŕíčçěîâ ňđĺňüĺăî ęëŕńńŕ ďî íŕďĺđĺä çŕäŕííîé öčęëîăđŕěěĺ ń âűńňî˙ěč đŕáî÷ĺăî îđăŕíŕ â äâóő ęđŕéíčő ďîëîćĺíč˙ő ďđčěĺíčňĺëüíî ę îäíîé čç ěîäčôčęŕöčé ýňîăî ěĺőŕíčçěŕ. Ďđč ńčíňĺçĺ đű÷ŕćíűő ěĺőŕíčçěîâ íŕđ˙äó ń ŕíŕëčňč÷ĺńęčěč ěĺňîäŕěč [1, 3-8] řčđîęî čńďîëüçóţňń˙ ăĺîěĺňđč÷ĺńęîĺ ěîäĺëčđîâŕíčĺ [9-15].
 äŕííîé đŕáîňĺ ďđĺäëŕăŕĺňń˙ ďîäőîä ę ďđîĺęňčđîâŕíčţ řĺńňčçâĺííűő ěĺőŕíčçěîâ ňđĺňüĺăî ęëŕńńŕ ń äâóě˙ ďđčáëčćĺííűěč îńňŕíîâęŕěč âűőîäíîăî çâĺíŕ â ęđŕéíčő ďîëîćĺíč˙ő íŕďĺđĺä ďî çŕäŕííîé öčęëîăđŕěěĺ ń âű˙âëĺíčĺě âîçěîćíűő âĺňâëĺíčé ęčíĺěŕňč÷ĺńęîé ńőĺěű äŕííîăî ěĺőŕíčçěŕ íŕ îńíîâĺ ęîíńňđóęňčâíîăî ěĺňîäŕ ăĺîěĺňđč÷ĺńęîăî ěîäĺëčđîâŕíč˙.
Ěĺňîä đĺřĺíč˙
Ďîńňđîĺíčĺ ăĺîěĺňđč÷ĺńęîé ěîäĺëč đŕńńěŕňđčâŕĺěîăî ěĺőŕíčçěŕ (đčńóíîę) íŕ÷číŕĺňń˙ ń âű÷ĺđ÷čâŕíč˙ ňđŕĺęňîđčč (îęđóćíîńňč) ňî÷ęč B ęđčâîřčďŕ AB ĺäčíč÷íîé äëčíű č îďđĺäĺëĺíč˙ íŕ íĺé (íŕ ňđŕĺęňîđčč) ďîëîćĺíčé B0, B1, B2 č B3 ýňîé ňî÷ęč ďđč ďîâîđîňĺ ęđčâîřčďŕ íŕ óăëű φ1, φB1, φ2 č φB2, ńîîňâĺňńňâĺííî çŕ číňĺđâŕëű ďđ˙ěîăî őîäŕ đŕáî÷ĺăî îđăŕíŕ, ďĺđâîăî âűńňî˙, îáđŕňíîăî őîäŕ č âňîđîăî âűńňî˙.
Äë˙ îáĺńďĺ÷ĺíč˙ đŕâíîěĺđíîăî ÷ĺáűřĺâńęîăî ďđčáëčćĺíč˙ (íŕčěĺíĺĺ óęëîí˙ţůĺăîń˙ îň íóë˙) íŕ číňĺđâŕëŕő âűńňîĺâ řŕňóííŕ˙ ňŕ÷ęŕ E â íŕ÷ŕëĺ č ęîíöĺ ęŕćäîăî čç ýňčő âűńňîĺâ äîëćíŕ íŕőîäčňüń˙ â îäíčő č ňĺő ćĺ ďîëîćĺíč˙ő. Ýňî îáĺńďĺ÷čâŕĺňń˙ ďđč đŕńďîëîćĺíčč íŕçâŕííűő ňî÷ĺę íŕ áčńńĺęňđčńŕő ν0ν0 č ν1ν1 óăëîâ φB2 č φB1 ńîîňâĺňńňâĺííî. Íŕçíŕ÷čâ îňíîńčňĺëüíóţ äëčíó řŕňóíŕ BE, đŕâíîé b, îňěĺňčě íŕ áčńńĺęňđčńŕő ν0ν0 č ν1ν1 ňî÷ęč E0 č E1.
Ńëĺäóţůčě ýňŕďîě ăĺîěĺňđč÷ĺńęîăî ěîäĺëčđîâŕíč˙ ěĺőŕíčçěŕ ˙âë˙ĺňń˙ ďđîĺęňčđîâŕíčĺ ňđĺóăîëüíîăî çâĺíŕ ECF č íŕçíŕ÷ĺíčĺ ĺăî ďîëîćĺíč˙ â ěîěĺíňű íŕ÷ŕëŕ č ęîíöŕ âűńňîĺâ â ęđŕéíčő ďîëîćĺíč˙ő đŕáî÷ĺăî îđăŕíŕ. Ďđčěĺě îňíîńčňĺëüíűĺ äëčíű ńňîđîí ECč CF ýňîăî çâĺíŕ, đŕâíűěč e č f, ŕ óăîë ěĺćäó íčěč, đŕâíűě η. Đŕńďîëîćčě ýňî çâĺíî âíŕ÷ŕëĺ č ęîíöĺ âűńňîĺâ ďîä óăëŕěč χ0 č χ1 (đčńóíîę) ďî îňíîřĺíčţ ę áčńńĺęňđčńŕě ν0ν0č ν1ν1 ńîîňâĺňńňâĺííî.
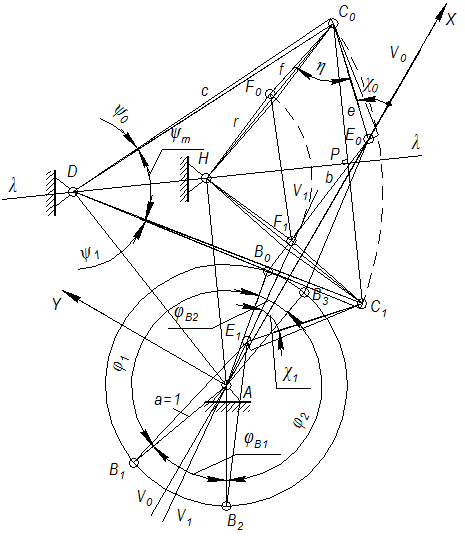
Đčńóíîę – Ăĺîěĺňđč÷ĺńęŕ˙ ěîäĺëü ęčíĺěŕňč÷ĺńęîé ńőĺěű řŕđíčđíîăî ěĺőŕíčçěŕ ňđĺňüĺăî ęëŕńńŕ ń ďđčáëčćĺííűě âűńňîĺě â äâóő ęđŕéíčő ďîëîćĺíč˙ő
 đĺçóëüňŕňĺ ďîëó÷čě ôčęńčđîâŕííűĺ ďîëîćĺíč˙ C0,C1 č F0, F1 ňî÷ĺę C č Fńîîňâĺňńňâĺííî â ěîěĺíňű íŕ÷ŕëŕ č ęîíöŕ âűńňîĺâ, ęîňîđűĺ îäíîâđĺěĺííî ˙âë˙ţňń˙ öĺíňđŕěč řŕđíčđîâ âűőîäíîăî çâĺíŕ DC, ćĺńňęî ńîĺäčíĺííűě ń đŕáî÷čě îđăŕíîě, č âńďîěîăŕňĺëüíîăî çâĺíŕ HF.
Öĺíňđ íĺďîäâčćíîăî řŕđíčđŕ Dâűőîäíîăî çâĺíŕ DC äîëćĺí íŕőîäčňüń˙ íŕ ďĺđďĺíäčęóë˙đĺ λλ, ďđîâĺäĺííîě čç ńĺđĺäčíű Pîňđĺçęŕ (őîđäű) C0C1, ńîĺäčí˙ţůĺăî ďîëîćĺíč˙ C0 č C1 ďîäâčćíîăî řŕđíčđŕ Câ íŕ÷ŕëĺ č ęîíöĺ âűńňîĺâ. Âîńďîëüçîâŕâřčńü çŕäŕííűě óăëîě ψm đŕçěŕőŕ âűőîäíîăî çâĺíŕ DC, íŕéäĺě čçâĺńňíűě ńďîńîáîě ďîëîćĺíčĺ řŕđíčđŕ D íŕ ďĺđďĺíäčęóë˙đĺ λλ č, ńëĺäîâŕňĺëüíî, îňíîńčňĺëüíóţ äëčíó ń ýňîăî çâĺíŕ. Ŕíŕëîăč÷íűě îáđŕçîě îďđĺäĺëčě ďîëîćĺíčĺ öĺíňđŕ íĺďîäâčćíîăî řŕđíčđŕ H âńďîěîăŕňĺëüíîăî çâĺíŕ HF, čńďîëüçó˙ îňđĺçîę F0F1 č íŕçíŕ÷čâ äëčíó r ýňîăî çâĺíŕ.
Ďîńëĺ ňîăî ęŕę íŕéäĺíű ďîëîćĺíč˙ öĺíňđîâ řŕđíčđîâ D č H, ńňŕíîâ˙ňń˙ čçâĺńňíűěč ěĺćöĺíňđîâűĺ đŕńńňî˙íč˙ AD č AHńďđîĺęňčđîâŕííîăî ěĺőŕíčçěŕ â îňíîńčňĺëüíűő ĺäčíčöŕő.
 đĺçóëüňŕňĺ ňŕęîăî ăĺîěĺňđč÷ĺńęîăî ďîńňđîĺíč˙ îáĺńďĺ÷ĺíî âűďîëíĺíčĺ çŕäŕííîé öčęëîăđŕěěű (óăëű φ1, φB1, φ2 č φB2) č ňđĺáóĺěîĺ óăëîâîĺ ďĺđĺěĺůĺíčĺ âűőîäíîăî çâĺíŕ ěĺőŕíčçěŕ (óăîë ψm), ÷ňî ďîçâîë˙ĺň ń÷čňŕňü ńčíňĺç ěĺőŕíčçěŕ íŕ óđîâíĺ ăĺîěĺňđč÷ĺńęîăî ěîäĺëčđîâŕíč˙ çŕâĺđřĺííűě.
Îňěĺňčě, ÷ňî â ďĺđčîäű âűńňîĺâ âűőîäíîĺ çâĺíî DCńîâĺđřŕĺň ěŕëűĺ ęîëĺáŕíč˙ íŕ óăëű ψ0 č ψ1, őŕđŕęňĺđčçóţůčĺ ňî÷íîńňü ďîçčöčîíčđîâŕíč˙ đŕáî÷ĺăî îđăŕíŕ â ýňč ďĺđčîäű, ŕ, ńëĺäîâŕňĺëüíî, č ňî÷íîńňü âűďîëíĺíč˙ ňđĺáóĺěîé ňĺőíîëîăč÷ĺńęîé îďĺđŕöčč.
Ěčíčěčçŕöč˙ óăëîâ ψ0 č ψ1 ˙âë˙ĺňń˙ îäíîé čç îńíîâíűő çŕäŕ÷ ńčíňĺçŕ đŕńńěŕňđčâŕĺěűő ěĺőŕíčçěîâ. Äë˙ ýňîăî đŕçđŕáîňŕĺě íĺîáőîäčěóţ ŕíŕëčňč÷ĺńęóţ ăĺîěĺňđč÷ĺńęóţ ěîäĺëü řĺńňčçâĺííîăî řŕđíčđíîăî ěĺőŕíčçěŕ ňđĺňüĺăî ęëŕńńŕ.
Ŕíŕëčňč÷ĺńęčĺ çŕâčńčěîńňč, íĺîáőîäčěűĺ äë˙ ńčíňĺçŕ đŕńńěŕňđčâŕĺěűő ěĺőŕíčçěîâ č đŕń÷ĺňŕ óăëîâ ψ0 č ψ1, ďîëó÷čě â ńčńňĺěĺ ęîîđäčíŕň AXY (đčńóíîę) ďóňĺě ďîńëĺäîâŕňĺëüíîăî âű÷čńëĺíč˙ ęîîđäčíŕň öĺíňđîâ řŕđíčđîâE, C, F, Dč H â čő őŕđŕęňĺđíűő ďîëîćĺíč˙ő â ńîîňâĺňńňâčč ń čńőîäíűěč äŕííűěč.
Ěŕňĺěŕňč÷ĺńęčĺ âűđŕćĺíč˙ äë˙ đŕń÷ĺňŕ óăëîâ ψ0 č ψ1 čěĺţň ńëĺäóţůčé âčä:


ăäĺ: 
 ; ;

















 . .
Ďîëó÷ĺííűĺ ôîđěóëű äë˙ đŕń÷ĺňŕ îňęëîíĺíčé âűőîäíîăî çâĺíŕ îň ďîëîćĺíč˙ âűńňî˙ â îáůĺě âčäĺ ěîćíî ďđĺäńňŕâčňü ńëĺäóţůčě îáđŕçîě:
ψ0 = ψ0(ψm,φ1, φB1, φ2, b, e, f,r, η,χ0, χ1);
ψ1= ψ1(ψm,φ1, φB1, φ2, b, e, f,r, η,χ0, χ1).
Îňěĺňčě, ÷ňî â őîäĺ îďňčěčçŕöčîííîăî ńčíňĺçŕ ęŕę čç óńëîâč˙ ěčíčěčçŕöčč óăëîâ ψ0 č ψ1 , ňŕę č ďî ňĺě čëč číűě äđóăčě ęđčňĺđč˙ě ďŕđŕěĺňđű ψm, φ1, φB1, φ2 îńňŕţňń˙ íĺčçěĺííűěč, ŕ ńâîáîäíűěč ďŕđŕěĺňđŕěč ˙âë˙ţňń˙ b, e, f, r, η, χ0, χ1.
Óęŕćĺě âîçěîćíűĺ íŕďđŕâëĺíč˙ âĺňâëĺíč˙ ńőĺěű ďđîĺęňčđóĺěîăî ěĺőŕíčçěŕ, ďîçâîë˙ţůčĺ ďîëó÷čňü ĺăî äîďîëíčňĺëüíűĺ ěîäčôčęŕöčč. Ďĺđâűĺ ÷ĺňűđĺ îńíîâíűĺ ěîäčôčęŕöčč âîçíčęŕţň ďđč đŕńďîëîćĺíčč öĺíňđîâ D č H ń đŕçëč÷íűő ńňîđîí îňđĺçęîâ C0C1 č F0F1. Ĺůĺ ÷ĺňűđĺ âŕđčŕöčč ěĺőŕíčçěŕ ďîëó÷ŕţňń˙ çŕ ń÷ĺň íŕďđŕâëĺíč˙, â ęîňîđîě îňęëŕäűâŕţňń˙ óăëű χ0 č χ1îňíîńčňĺëüíî áčńńĺęňđčń ν0ν0 č ν1ν1– ďî ÷ŕńîâîé ńňđĺëęĺ čëč ďđîňčâ. Óęŕçŕííűĺ âŕđčŕöčč ěĺőŕíčçěŕ ńëĺäóĺň ňîćĺ îňíĺńňč ę ěîäčôčęŕöč˙ě, ňŕę ęŕę óăëű χ0 č χ1 ěîćíî ěĺí˙ňü íĺďđĺđűâíî ëčřü â čçîëčđîâŕííűő äđóă îň äđóăŕ äîďóńňčěűő îáëŕńň˙ő. Ňŕęčě îáđŕçîě, îáůĺĺ ÷čńëî ěîäčôčęŕöčé đŕńńěŕňđčâŕĺěîăî ěĺőŕíčçěŕ đŕâíî řĺńňíŕäöŕňč.
Çŕęëţ÷ĺíčĺ
Ďîëó÷ĺííŕ˙ ďóňĺě ęîíńňđóęňčâíîăî ăĺîěĺňđč÷ĺńęîăî ěîäĺëčđîâŕíč˙ ńőĺěŕ řŕđíčđíîăî řĺńňčçâĺííîăî ěĺőŕíčçěŕ ďîçâîëčëŕ ńîçäŕňü ŕíŕëčňč÷ĺńęóţ ăĺîěĺňđč÷ĺńęîé ěîäĺëü řĺńňčçâĺííîăî řŕđíčđíîăî ěĺőŕíčçěŕ ňđĺňüĺăî ęëŕńńŕ č ďîëó÷čňü â čňîăĺ ěŕňĺěŕňč÷ĺńęóţ ěîäĺëü ńčíňĺçŕ ňŕęčő ěĺőŕíčçěîâ.Óńňŕíîâëĺíű ńâîáîäíűĺ ďŕđŕěĺňđű ńčíňĺçŕ řŕđíčđíîăî řĺńňčçâĺííîăî ěĺőŕíčçěŕ: îňíîńčňĺëüíűĺ äëčíű b, e, fč r çâĺíüĺâ BE, ECF č HF, óăîë η ěĺćäó ńňîđîíŕěč EC č CF çâĺíŕ ECF č óăëű χ0 č χ1, îďđĺäĺë˙ţůčĺ ďîëîćĺíčĺ ýňîăî çâĺíŕ îňíîńčňĺëüíî áčńńĺęňđčń ν0ν0 č ν1ν1 â íŕ÷ŕëĺ č ęîíöĺ číňĺđâŕëîâ âűńňîĺâ.  ďîńëĺäóţůĺě ýňč ďŕđŕěĺňđű ěîăóň áűňü čńďîëüçîâŕíű äë˙ ďîčńęŕ îďňčěŕëüíűő ďî ňĺě čëč číűě ęđčňĺđč˙ě ěĺőŕíčçěîâ ďđč çŕäŕííîé óăëŕěč φ1, φB1, φ2öčęëîăđŕěěĺ äâčćĺíč˙ đŕáî÷ĺăî îđăŕíŕ č çŕäŕííîé âĺëč÷číĺ ψmĺăî óăëîâîăî ďĺđĺěĺůĺíč˙ çŕ číňĺđâŕëű äâčćĺíč˙.  ÷ŕńňíîńňč, îäíčěč čç âŕćíĺéřčő çŕäŕ÷ ńčíňĺçŕ đŕńńěŕňđčâŕĺěűő ěĺőŕíčçěîâ ˙âë˙ĺňń˙ ďîâűřĺíčĺ ňî÷íîńňč âűńňî˙ âűőîäíîăî çâĺíŕ (ěčíčěčçŕöč˙ óăëîâ ψ0 č ψ1).
References
1. Khomchenko, V. G. Proektirovanie ploskikh rychazhnykh mekhanizmov tsiklovykh mashin-avtomatov i manipulyatorov. – Omsk: Izd-vo OmGTU. 1995. – 152 s.
2. Nadezhdin, I. V. Proektirovanie rychazhnykh mekhanizmov tsiklovykh mashin-avtomatov. – M.: Mashinostroenie. – 2010. – 232 s.
3. Khomchenko, V. G. Analiticheskii sintez shestizvennogo mekhanizma tret'ego klassa s dvumya ostanovkami vykhodnogo zvena po zadannoi tsiklogramme // Teoriya mekhanizmov i mashin. – Khar'kov. 1986. Vyp. 41. S. 48-52.
4. Hain K. Sechsgliedriges Koppelgetriebenutzt Totlagenauszum Erzeugen von Endrasten // Maschinenmarkt. – 1981, 87. N 96. S. 2094-2097.
5. Khomchenko, V. G. Graficheskii i analiticheskii metody sinteza shestizvennogo sharnirnogo mekhanizma tret'ego klassa s priblizhennym vystoem vykhodnogo zvena v krainem polozhenii po zadannoi tsiklogramme / Omsk.politekhn. in-t. – Omsk, 1991. 7 s. Dep v VINITI 11.06.91, ą 2460-V91.
6. Sintez rychazhnykh mekhanizmov tret'ego klassa s reguliruemym vystoem iz usloviya minimizatsii otkloneniya ugla asimmetrii / V.G. Khomchenko, V.A. Baksheev, V.S. Kho-runzhin, N.G. Skabkin / Mekhanika protsessov i mashin: Sb. nauch. tr. / Pod red. V. V. Evstifeeva. Omsk: Iz-vo OmGTU, 2002. S. 8-17.
7. Sintez shestizvennykh rychazhnykh mekhanizmov 3-go klassa kak generatorov zadannogo semeistva tsiklogramm / V.G. Khomchenko, V.A. Baksheev, V.S. Khorunzhin, N.G. Skabkin / Dinamika sistem, mashin i mekhanizmov: Materialy IV Mezhdunar. nauch.-tekhn. konf., posvyashchennoi 60-letiyu OmGTU. Omsk: Izd-vo OmGTU,2002. Kn.1. S.111-113.
8. Peisakh, E. E. Sistema proektirovaniya ploskikh rychazhnykh mekhanizmov / E. E. Peisakh, V. A. Nesterov, K. V. Frolov. – M.: Mashinostroenie. 1988 . – 230 s.
9. Geronimus, Ya. L. Geometricheskii apparat teorii sinteza ploskikh mekhanizmov. M.: Gos. izd-vo fiz.-mat. liter., 1962. – 400 s.
10. Golovin, A.A. i dr. Kinematicheskii analiz rychazhnykh mekhanizmov metodami geometrii kompleksnoi ploskosti i splain-approksimatsii //Izv. vuzov. Mashinostroenie. 1987. – ą 1. – S.28-33.
11. Ovakimov, A.G. Pogruppnyi vektornyi metod resheniya zadach kinematiki ploskikh mekhanizmov (1.Zadacha o polozheniyakh) //Izv. vuzov. Ser. Mashinostroenie. 1975. ą 6. – S. 52-56.
12. Ozol, O.G. Analiticheskii metod treugol'nikov v kinematike ploskikh mekhanizmov //Analiz i sintez mekhanizmov. – M.: Mashinostroenie. 1966. – S. 128-144.
13. Pustyl'nik, G.M. O geometricheskom modelirovanii kinematiki mnogozvennikov //Teoriya mekhanizmov i mashin. 1987. ą42. – S. 66-72.
14. Romantsev, A.A. Reshenie zadach o peremeshcheniyakh zven'ev ploskoi kinematicheskoi tse-pi, predstavlennoi v vide geometricheskoi sistemy / A.A. Romantsev, N.S. Moshkova //Dokl. AN Uzb.SSR. 1983. – T. II. – S. 12-16.
15. Sinchenko, L.D. Nekotorye voprosy geometrii chetyrekhzvennykh mekhanizmov s vrashchatel'nymi parami //Tr. /LITMO. – L., 1974. – Vyp.77.– S. 20-26.
|








